



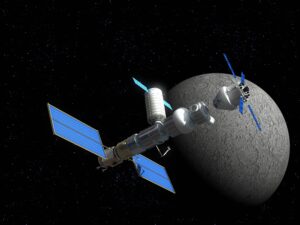
Неотъемлемой частью плана НАСА по возвращению астронавтов на Луну в этом десятилетии является создание космической станции Лунные ворота, которая станет первым постоянным форпостом человечества за пределами низкой околоземной орбиты. Gateway, партнерство между НАСА, Канадским космическим агентством (CSA), Европейским космическим агентством (ESA) и Японским агентством аэрокосмических исследований (JAXA), предназначено для поддержки операций на поверхности Луны, а также служит отправной точкой для исследования Марса.
Шлюз будет значительно меньше Международной космической станции (МКС), первоначально состоящий всего из двух модулей с дополнительными модулями, которые будут добавлены со временем. Первыми частями станции, которые достигнут лунной орбиты, будут силовой и двигательный элемент (PPE), прикрепленный к аванпосту жилья и логистики (HALO), который планируется запустить вместе на SpaceX Falcon Heavy ракета в ноябре 2024 года. Относительно небольшой размер Шлюза возможен, потому что большую часть времени на станции не будет экипажа-астронавты могут проходить через него в течение нескольких недель, но ожидается, что Gateway проведет около 11 месяцев в году без кого-либо на борту.
Это представляет некоторые уникальные проблемы для Gateway. На МКС астронавты тратят значительное количество времени на содержание станции, но Gateway придется поддерживать себя в рабочем состоянии в течение длительных периодов времени без какой-либо прямой помощи человека.
Чтобы это осуществить, НАСА разрабатывает менеджер систем транспортных средств, или VSM, которые будут действовать как вездесущая компьютерная система, найденная практически на каждом научно-фантастическом звездолете. VSM будет автономно управлять всеми функциями Gateway, заботясь о любых возникающих проблемах, в той степени, в какой ими можно управлять с помощью умного программного обеспечения и случайного ввода от удаленного человека.
В то время как сам Шлюз можно рассматривать как своего рода робот, существует ограниченное количество, которое может быть разумно и эффективно сделано с помощью специализированных автоматизированных систем, и НАСА пришлось найти компромисс между избыточностью и сложностью и массой. Например, была некоторая дискуссия о том, должны ли люки Gateway открываться и закрываться самостоятельно, и НАСА в конечном итоге решило оставить люки с ручным управлением. Но это не обязательно означает, что Gateway не сможет открыть свои люки без помощи человека; это просто означает, что будут нужны роботизированные руки, а не человеческие.
НАСА уже имеет значительный опыт работы с IVR. Robonaut 2, полноразмерный гуманоидный робот, провел несколько лет на Международной космической станции, начиная с 2011 года, изучая, как выполнять задачи, которые в противном случае должны были бы выполняться астронавтами-людьми. Совсем недавно трио кубических, размером с тостер, свободно летающих роботов под названием Astrobees поселились на МКС, где они экспериментировали с автономным зондированием и навигацией.
Проект НАСА под названием ISAAC (Интегрированная система автономного и адаптивного ухода) в настоящее время изучает, как роботы, подобные Astrobee, могут использоваться для различных задач на Шлюзе, от мониторинга работоспособности станции до автономной передачи грузов.
Внутрикорабельные роботы-это всего лишь половина роботизированной команды, которая будет необходима для того, чтобы Шлюз работал автономно в долгосрочной перспективе. Космические станции полагаются на сложную внешнюю инфраструктуру для питания, движения, терморегулирования и многого другого. С 2001 года на МКС находится Canadarm2, 17,6-метровая роботизированная рука, которая способна перемещаться по станции, захватывать и манипулировать объектами, находясь под контролем человека, как внутри станции, так и с земли.
Канадское космическое агентство в партнерстве с компанией космических технологий MDA разрабатывает новую роботизированную систему для ворот под названием Canadarm3, запуск которой запланирован на 2027 год. Canadarm3 будет включать в себя 8,5-метровую руку для захвата космических кораблей и перемещения крупных объектов, а также меньшую, более ловкую роботизированную руку, которую можно использовать для деликатных задач. Меньшая рука может даже отремонтировать большую руку, если это необходимо. Но что действительно отличает Canadarm3 от его предшественников, так это то, как он управляется, по словам Даниэля Рея, Главный инженер Gateway и системный менеджер CSA. “Одна из самых новых вещей в Canadarm3-это ее способность работать автономно, без какого-либо экипажа”, — говорит Рей. Эта возможность опирается на новое поколение программного и аппаратного обеспечения, которое дает руке чувство осязания, а также способность реагировать на окружающую среду без прямого контроля человека.
Автономные задачи Canadarm3 на Gateway будут включать внешний осмотр, разгрузку логистических транспортных средств, развертывание научных полезных нагрузок и ремонт Gateway путем замены поврежденных компонентов запасными частями. Рей говорит нам, что там также будет научный логистический шлюз с подвижным столом, который можно использовать для передачи оборудования в Шлюз и из него.